
 English
English 中文简体
中文简体 русский
русский

")
 Read More
Read More
Product Category
NEW Category
Contact us
Contact Us
We specialise in the research, development and manufacture of electrical wires and cables.
 +86-15021943462
+86-15021943462AC Motor vs DC Motor: Key Differences, How They Work & How to Choose
Content
AC Motor and DC Motor: The Core Difference
The fundamental difference between AC and DC electric motors is the type of electrical current each is designed to convert into mechanical rotation. AC motors run on alternating current — a supply that reverses polarity at a fixed frequency (50 Hz or 60 Hz depending on the grid standard). DC motors run on direct current, where voltage and current flow continuously in one direction. This single distinction in power supply drives every downstream difference in motor construction, speed control method, maintenance requirement, and application suitability.
Both motor types obey the same foundational principle — the Lorentz force law, which states that a current-carrying conductor placed in a magnetic field experiences a force perpendicular to both the current direction and the field direction. The torque that spins the rotor is a direct consequence of this force acting across a gap between stationary and rotating components. What differs between AC and DC electric motors is how the magnetic field is created, how it is sustained, and how it interacts with the rotor windings over time.
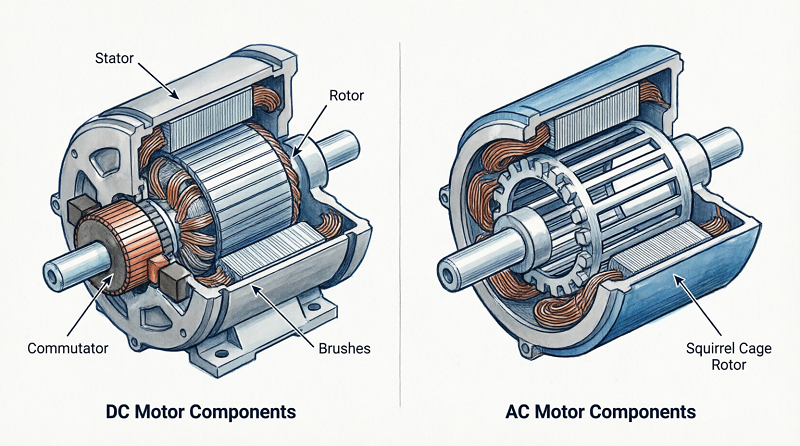
How AC Motors Work
Electric AC motors generate a rotating magnetic field in the stator — the stationary outer assembly — by supplying alternating current to distributed windings arranged around the stator bore. In a three-phase induction motor, the three phases are displaced 120° apart in both space and time, producing a field that rotates continuously at synchronous speed. This rotating field induces a current in the rotor conductors by electromagnetic induction; the induced current in turn creates its own magnetic field, and the interaction between the two fields produces torque.
The rotor of a squirrel-cage induction motor — the most widely deployed variant of electric AC motors globally — contains no windings, no brushes, and no external electrical connections. The rotor bars are short-circuited at each end by conductive end rings, and current flows through them purely by induction. This construction makes squirrel-cage AC motors exceptionally robust: there are no wearing contact parts other than the bearings, and the motor can run continuously for years in dusty, wet, or vibration-heavy environments with minimal maintenance.
Synchronous AC motors operate on a related but distinct principle: the rotor is magnetised — either by permanent magnets or by a separately excited field winding — and locks in step with the rotating stator field, running at exactly synchronous speed regardless of load (within the pull-out torque limit). Synchronous motors are used where precise speed consistency is required, including in textile machinery, paper mills, and precision pumping systems.
How DC Motors Work
In a conventional brushed DC motor, the stator produces a stationary magnetic field — either from permanent magnets or from field windings energised by DC. The rotor, called the armature, carries wound conductors connected to a segmented commutator. Carbon brushes maintain sliding electrical contact with the commutator, switching current direction through successive armature coils as the rotor turns. This mechanical commutation ensures that the armature current always flows in the direction that sustains torque in the same rotational direction, regardless of rotor position.
The commutator-brush interface is the defining structural difference between brushed DC motors and AC motors. It enables straightforward speed control — reducing the supply voltage or the armature current directly reduces speed — but introduces maintenance obligations. Brushes wear progressively, generating carbon dust and requiring periodic inspection and replacement. At high speeds or in dusty environments, brush wear accelerates significantly. In applications where maintenance access is difficult or contamination is a concern, this is a decisive disadvantage.
Brushless DC motors (BLDC) eliminate the commutator entirely, replacing mechanical switching with electronic commutation via a dedicated controller that monitors rotor position through Hall-effect sensors or back-EMF sensing and switches current through the stator windings in sequence. BLDC motors combine the speed-control flexibility of traditional DC designs with the mechanical simplicity of AC induction motors, and have become the dominant choice in applications ranging from computer cooling fans and electric vehicle traction drives to industrial servo systems and drone propulsion.
AC vs DC Electric Motor: Side-by-Side Comparison
The table below summarises the principal differences between AC and DC motors across the specification parameters most relevant to industrial and commercial procurement decisions.
| Parameter | AC Motor | Brushed DC Motor | Brushless DC Motor |
|---|---|---|---|
| Power supply | AC mains (single or three-phase) | DC (battery or rectified supply) | DC with electronic controller |
| Speed control | Variable frequency drive (VFD) | Voltage / armature current adjustment | PWM via ESC or servo drive |
| Maintenance | Bearing service only | Brush and commutator replacement | Bearing service only |
| Efficiency | High (IE3/IE4 grades: 93–96%) | Moderate (brush friction losses) | Very high (no brush losses) |
| Starting torque | Moderate (high inrush current) | Very high (full torque from standstill) | High (electronically controllable) |
| Cost (motor only) | Low to moderate | Low | Moderate to high |
| System cost (with drive) | Moderate (VFD adds cost) | Low (simple controller) | High (complex controller) |
| Typical power range | Fractional W to multi-MW | Fractional W to ~100 kW | Fractional W to ~500 kW |
Speed Control: The Practical Difference Between AC and DC Electric Motors
Speed control is where the difference between AC and DC electric motors becomes most operationally significant. In a brushed DC motor, speed is directly proportional to armature voltage and inversely proportional to field flux — adjusting either variable with a simple rheostat or PWM controller produces smooth, wide-range speed variation. This made DC motors the default choice for variable-speed industrial drives throughout much of the 20th century, particularly in applications such as rolling mills, paper machines, and crane hoists where speed needed to be adjusted continuously under load.
The advent of reliable, cost-effective variable frequency drives (VFDs) fundamentally changed the competitive position of AC motors and DC motors in variable-speed applications. A VFD converts the fixed-frequency mains supply to a variable-frequency, variable-voltage output, allowing an AC induction motor to run at any speed across a wide range — typically 10% to 120% of rated speed — with full torque control. Modern VFDs implement vector control or direct torque control (DTC) algorithms that provide dynamic response comparable to a DC drive, eliminating the primary performance advantage that DC systems previously held.
The practical implication is that for new fixed-speed or variable-speed industrial installations drawing from a three-phase AC supply, an IE3 or IE4-rated AC induction motor with a VFD is almost always the economically and technically superior choice. The DC motor's remaining strongholds are battery-powered mobile equipment (where the supply is inherently DC), applications requiring very high starting torque at low supply voltages, and legacy facilities where existing DC infrastructure makes retrofit costly.
Choosing Between AC and DC Motors: Application-Driven Decision Framework
No single motor type is universally superior. The correct selection between AC DC electric motors depends on the specific demands of the application, the available power supply, the maintenance environment, and the total cost of ownership over the design service life.
Choose an AC induction motor when:
- The installation draws from a standard single-phase or three-phase AC mains supply.
- The duty cycle is continuous or near-continuous and the environment is harsh, wet, dusty, or explosive — the brushless construction eliminates ignition risk from brush arcing.
- Power output exceeds 50 kW, where AC induction motors offer significant cost and efficiency advantages over equivalent DC designs.
- Minimal maintenance access is available — HVAC fans, pumps, compressors, and conveyor drives in remote or difficult-access locations.
Choose a brushed DC motor when:
- The application is battery-powered and low-voltage — power tools, small appliances, automotive ancillaries, and hobby robotics.
- Very high starting torque relative to motor size is required and the duty cycle is intermittent.
- The control electronics budget is constrained — a simple PWM controller is substantially cheaper than a VFD or BLDC driver.
Choose a brushless DC motor when:
- The application demands high efficiency, high power density, and long service life in a compact form factor — electric vehicles, drones, medical devices, and precision servo systems.
- Speed and position must be controlled with high precision across a wide dynamic range.
- Maintenance is impractical but reliability is critical — the absence of brushes and commutator eliminates the most common failure mode in DC motors.
In practice, the boundary between AC motors and DC motors has blurred significantly as power electronics have matured. A BLDC motor driven by a sophisticated three-phase inverter is electrically indistinguishable from a permanent-magnet synchronous AC motor — the same hardware can be classified as either, depending on the control algorithm applied. What ultimately matters is whether the complete motor-drive system delivers the required torque-speed characteristic, efficiency, reliability, and total cost of ownership for the target application.
PREV:Severe Duty Motors: Cast Iron, 1.25 SF & IP66 Protection Guide
NEXT:Severe Duty Motors: Heavy Duty Electric Motor Selection & Uses
NEXT:Severe Duty Motors: Heavy Duty Electric Motor Selection & Uses
Interested in cooperation or have questions?





Let'S Work Together Welcome Aboard!
-

-
 +86-15021943462
+86-15021943462 -
 Room 2326, 23rd Floor 2000 Zhongshan North Road Putuo District Shanghai, China
Room 2326, 23rd Floor 2000 Zhongshan North Road Putuo District Shanghai, China
Join Our Mailing List
Product Categories
Quick Links
Quick Links
